







- Description
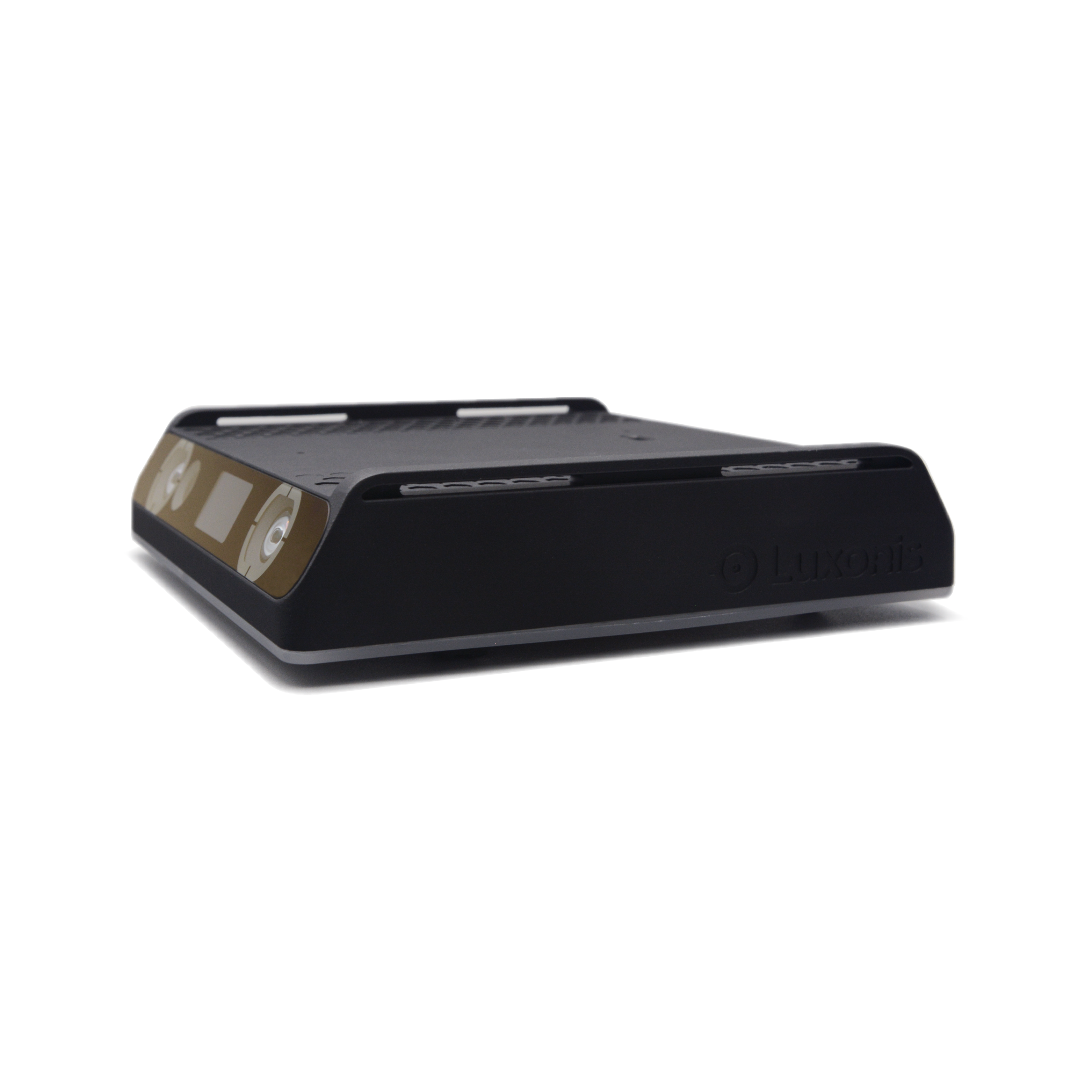
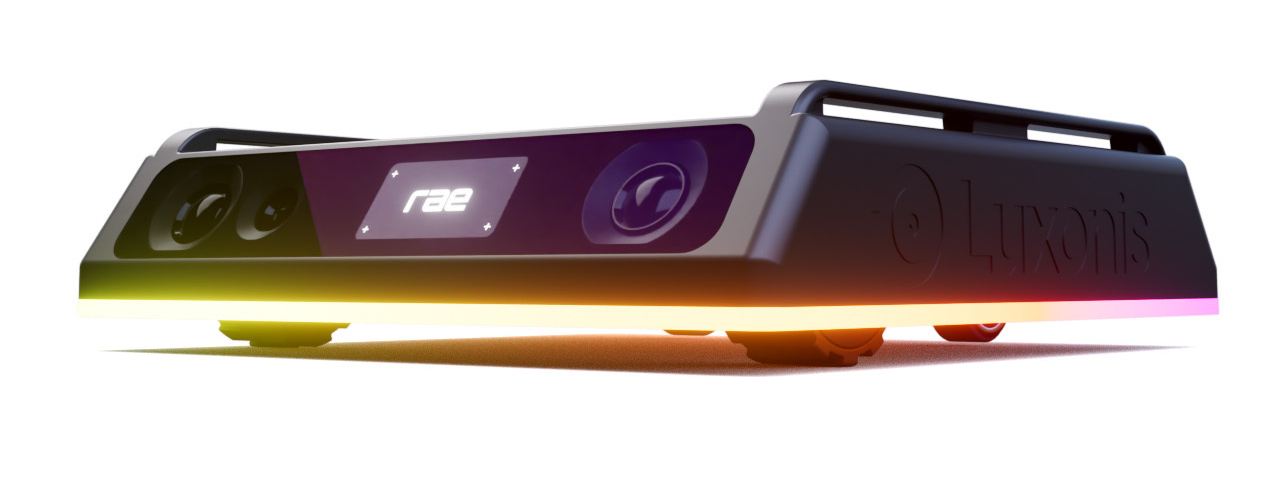
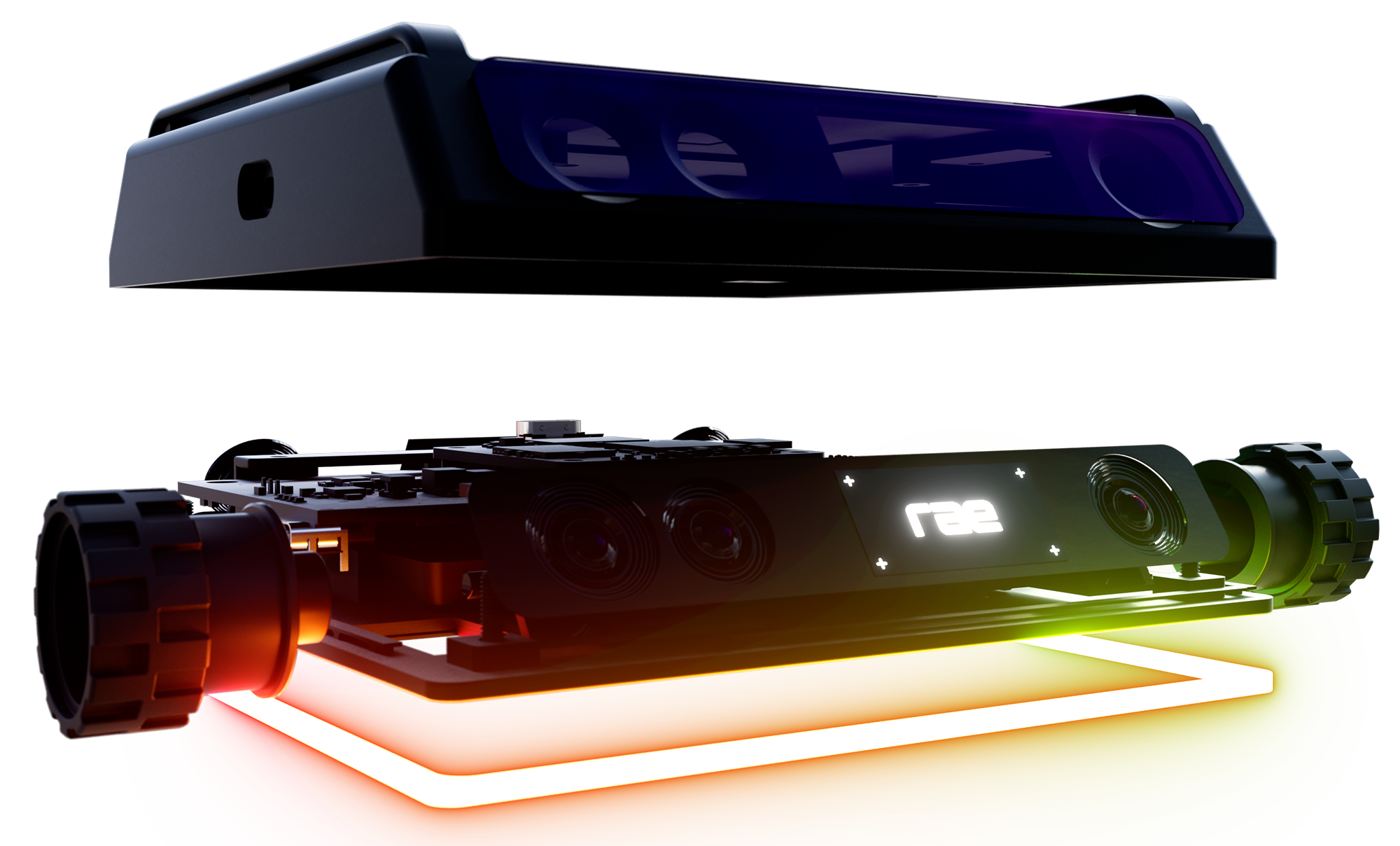
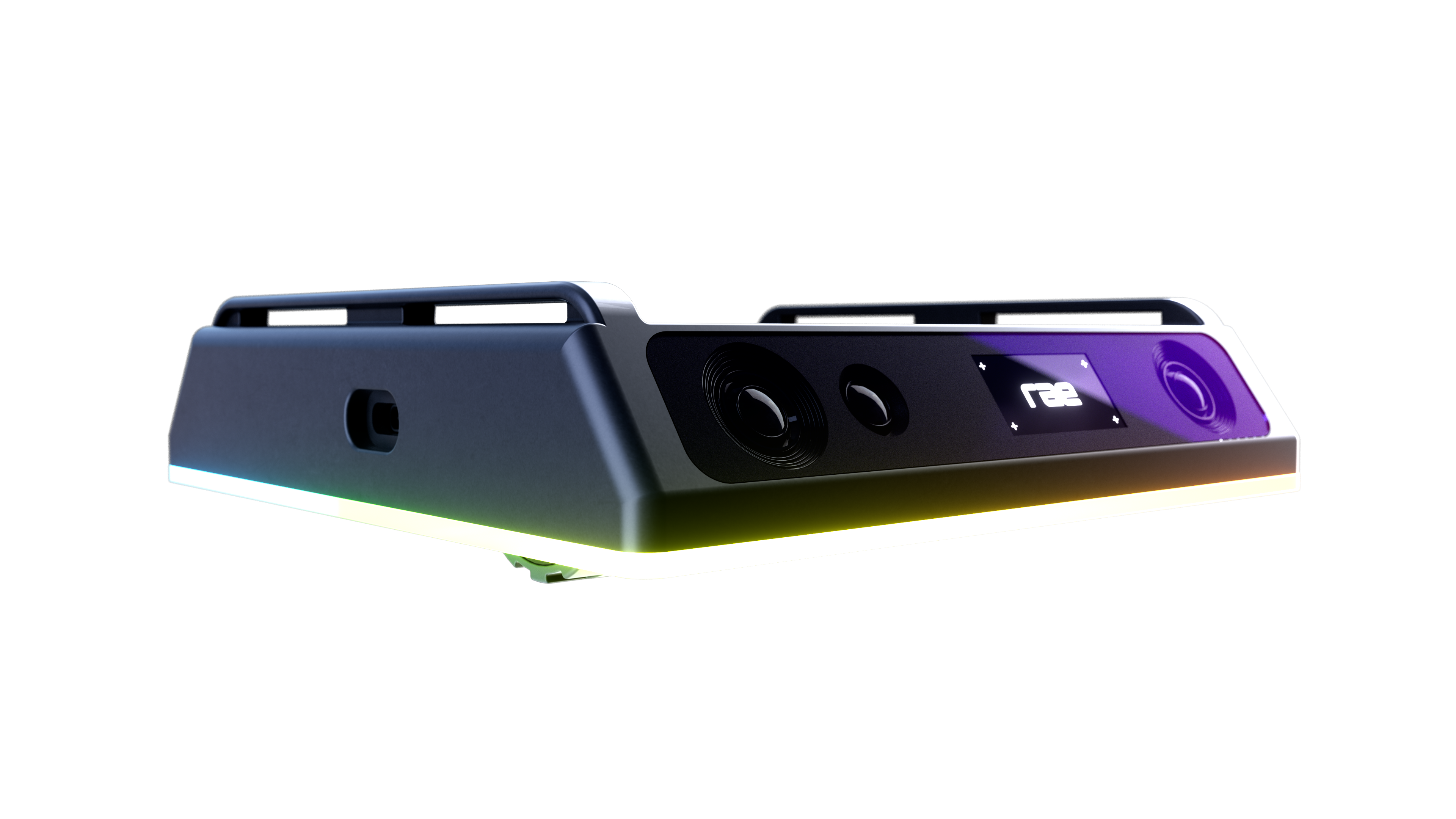
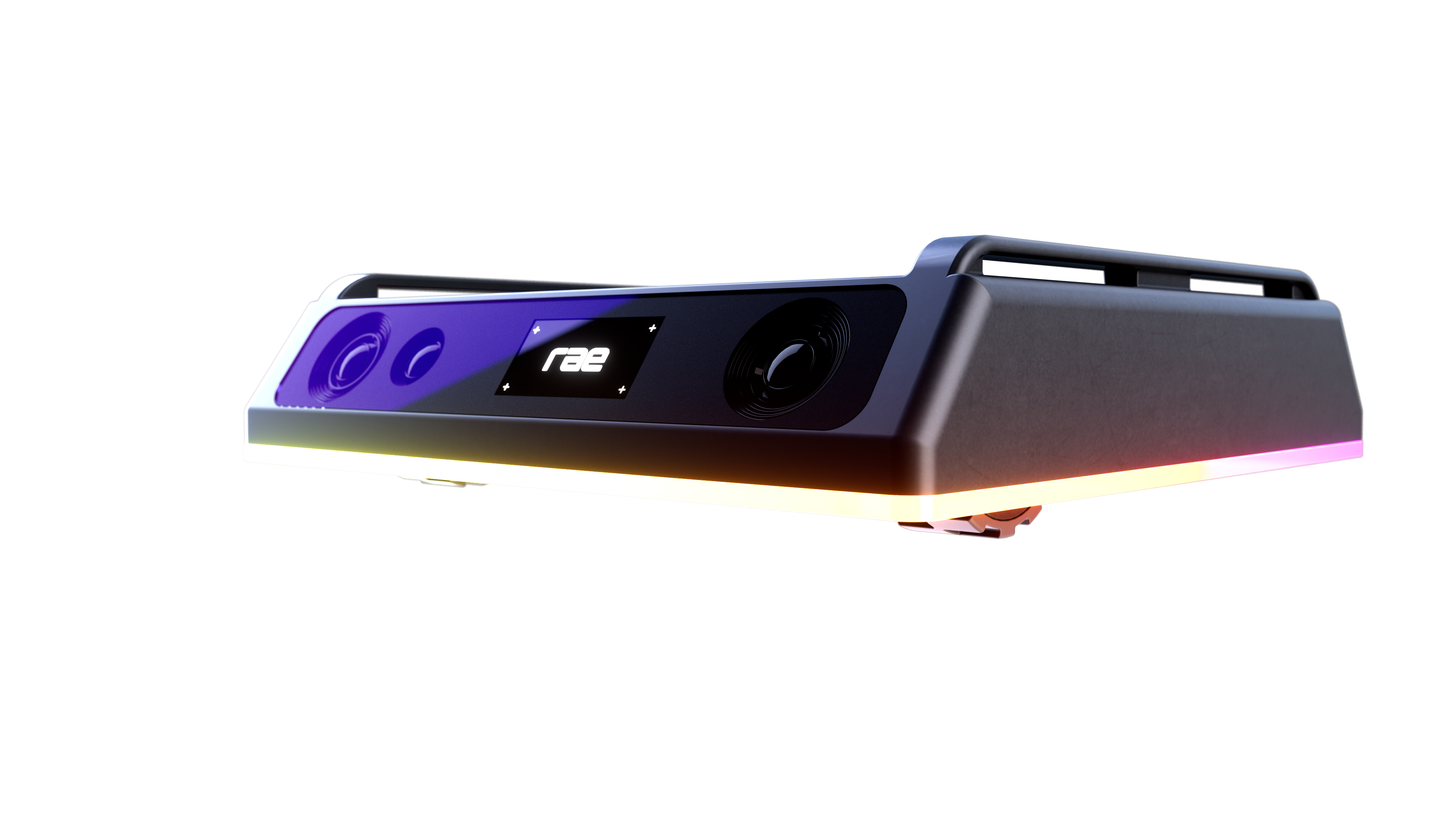
- Product Diagram
- Technical Specifications
- Package Includes
- Files
RAE is built on top of the RVC3, which along with AI, CV, video encoding, and stereo depth features, also supports on-chip VIO and Sparse SLAM. RAE is running ROS2 which handles path planning and navigation.
Main features:
-
Cloud platform - Luxonis Hub - connectivity out-of-the-box
See the documentation here on how to connect the rae to the Luxonis Hub. - RVC3 with 4GB of RAM and 32GB eMMC storage
- 3.0 TOPS for AI with INT8 quantization support
- Quad-core ARM A53 @ 1.5GHz, running Yocto Linux, acting as a host computer
- Run any AI model, even custom architectured/built ones - models need to be converted
- On-device SLAM / VIO support
- Encoding: H.264, H.265, MJPEG - 4K/75FPS, Decoding: 4K/60FPS
- Computer vision: warp (undistortion), resize, crop via ImageManip node, edge detection, feature tracking. You can also run custom CV functions
- Stereo depth perception with filtering, post-processing, RGB-depth alignment, and high configurability
- Object tracking: 2D and 3D tracking with ObjectTracker node
- IMU: BMI270 6-axis IMU
- Connectivity: USB-C or WiFi (AP)
- Battery: 5000mAh Li-Ion, cca 1 hour of runtime
- Speaker: 1W, 100Hz - 20kHz
- Microphone array: 6x I2S MEMS microphones, 60Hz - 20kHz
- Display: RGB TFT, 0.96", 80x160 Pixels
- Dimensions: 120mm x 120mm x 32mm
- Weight: 400g

Hardware specifications
Hardware features of the RAE:- Utilizes OAK-SoM MAX (OAK-SoM-Max-1 configuration)
- Wireless card: Intel 9260 (via PCIe M.2)
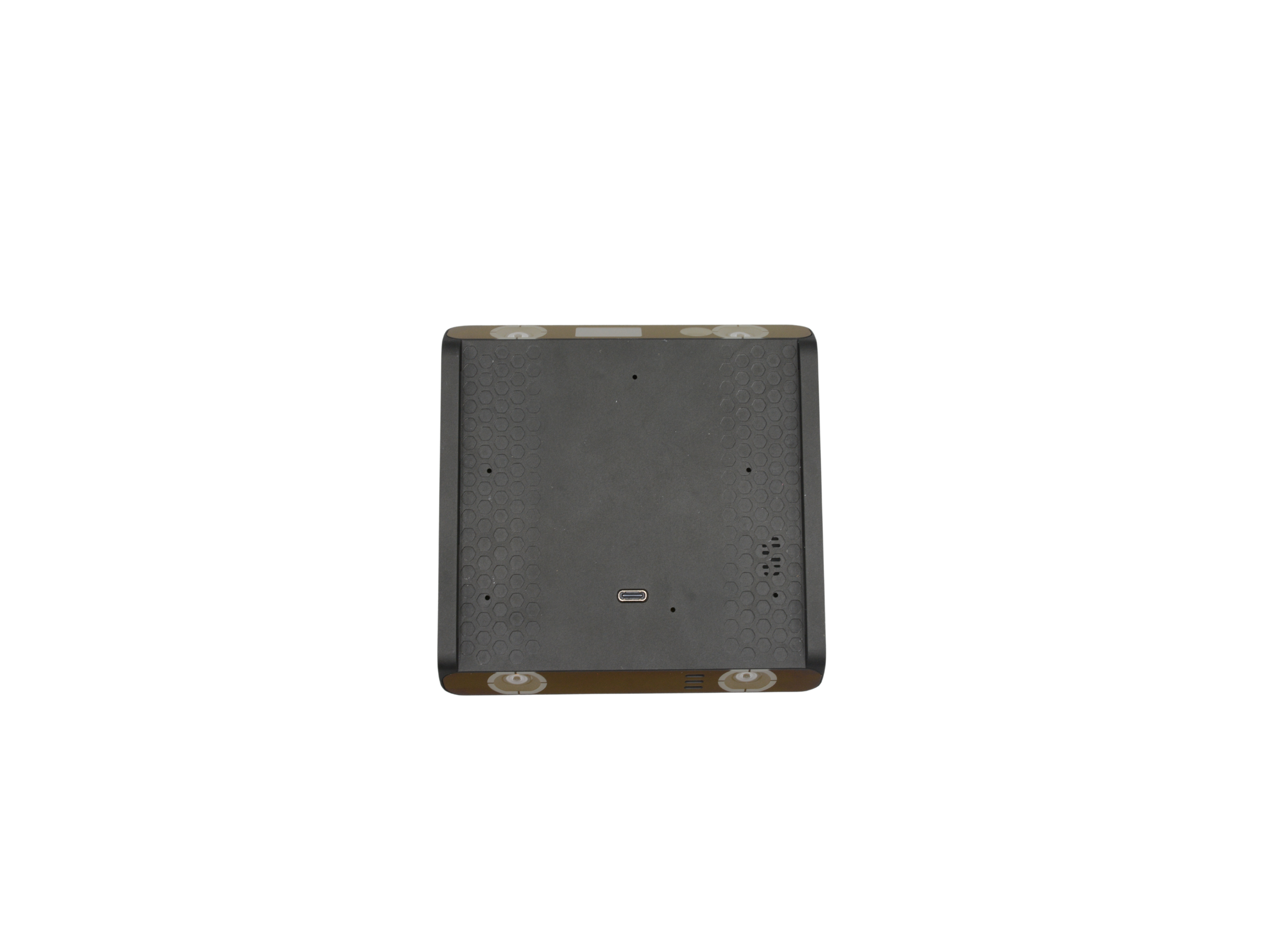
- Accessory USB-C (on top) works as USB3.0 host, so you can connect USB devices to it
- USB-C charging port (on the side) is USB2, while Accessory USB-C (on top) is USB3
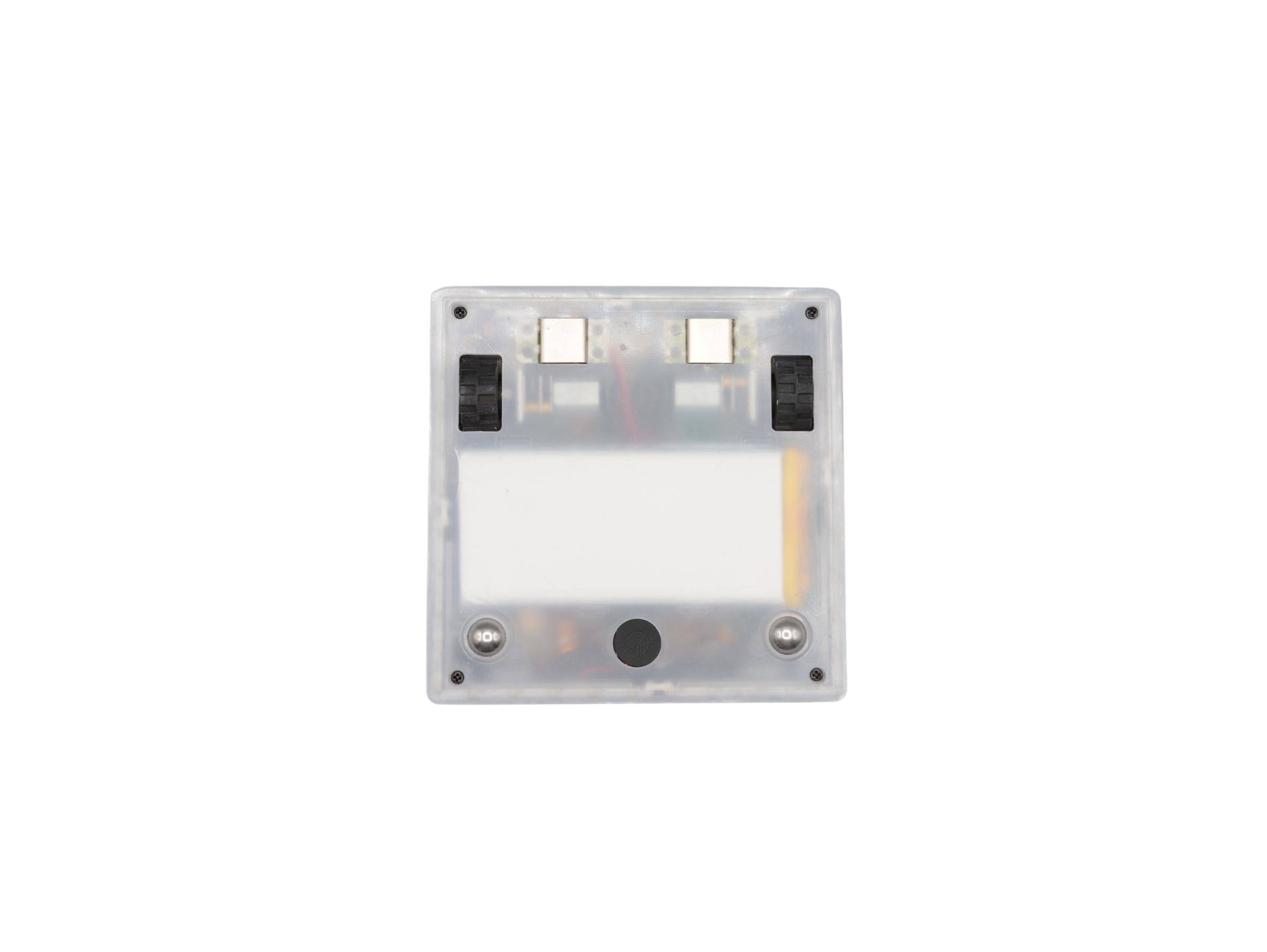
- LED ring (around the bottom): 10 LEDs per side, in total 40 LEDs individually addressable via WS2812 protocol
Camera specifications
RAE uses central RGB camera based on IMX214 sensor and two pairs (front and back) of 120FPS global shutter cameras based on OV9782 color sensor.
Sensors specifications| Camera Specs | Color | Stereo pair / Color |
|---|---|---|
| Sensor | IMX214 (color, PY138) | OV9782 (color, PY139) |
| DFOV / HFOV / VFOV | 117° / 105° / 88° | 150° / 128° / 80° |
| Rectified Depth FOV | N/A | 106° / 97° / 70° |
| Resolution | 13MP (4208x3120) | 1MP (1280x800) |
| Focus | FF: 60cm - ∞ | FF: 18cm - ∞ |
| Max Framerate | 60 FPS | 120 FPS |
| Shutter | Rolling | Global |
| F-number | 2.2 ±5% | 2 ±5% |
| Lens size | 1/3 inch | 1/4 inch |
| Effective Focal Length | 2.26mm | 1.69mm |
| Pixel size | 1.55µm x 1.55µm | 3µm x 3µm |
Stereo depth perception
This OAK camera has a baseline of 7.5cm - the distance between the left and the right stereo camera. Minimal and maximal depth perception (MinZ and Max) depends on camera FOV, resolution, and baseline- more information here.
- Ideal range: 40cm - 6m
- MinZ: ~20cm (400P OR 800P, extended), ~37cm (800P)
- MaxZ: ~10 meters with a variance of 10%
Extended means that StereoDepth node has Extended disparity mode enabled.
Integrated IMUThis OAK camera has an integrated BMI270, a 6-axis IMU (Inertial Measurement Unit). See IMU node for the API details on how to use it.
Package contains:
- RAE
- Cable USB-CA-1m
